Portfolio
RALS - Robot Articulated Links Servo System
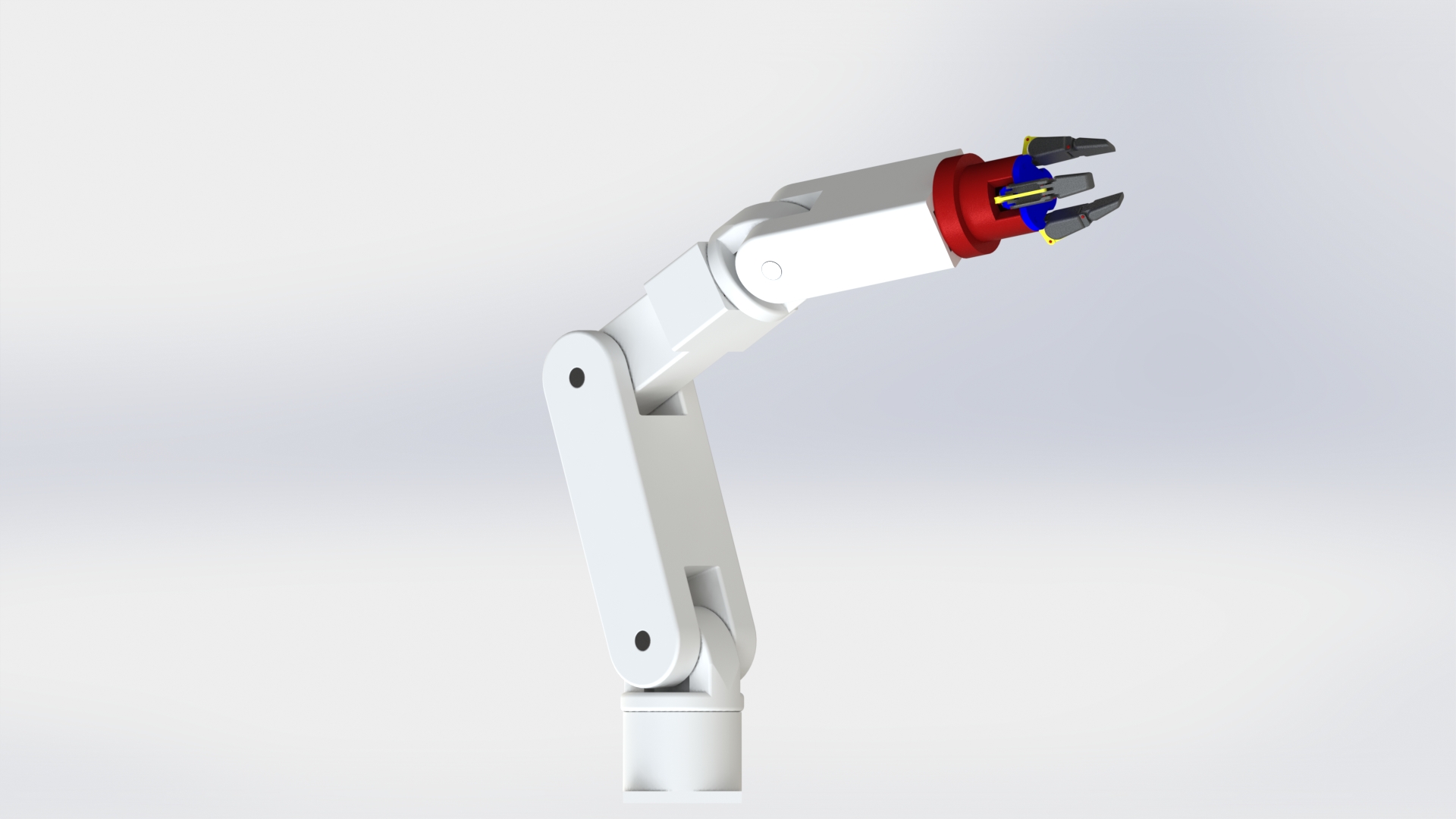
Hello, I am RALS, designed to study the robotic manipulator's mechanisms and modes of manipulation, like prehensible and non-prehensible manipulation. I am a six DoF robotic arm with a 6R configuration equipped with a three-fingered adaptive gripper.
- Compact Design
- 6R configuration
- Articulated links
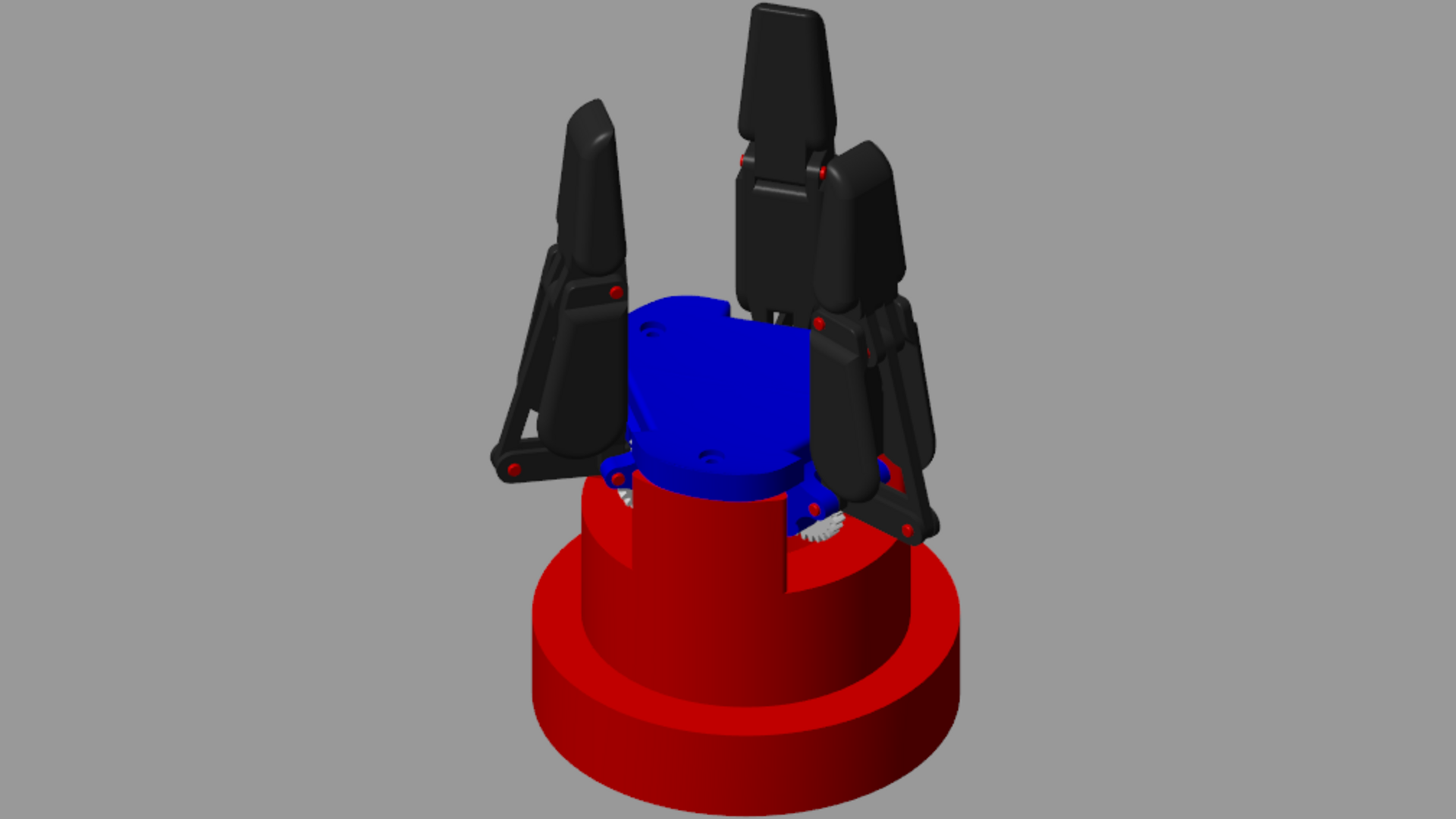
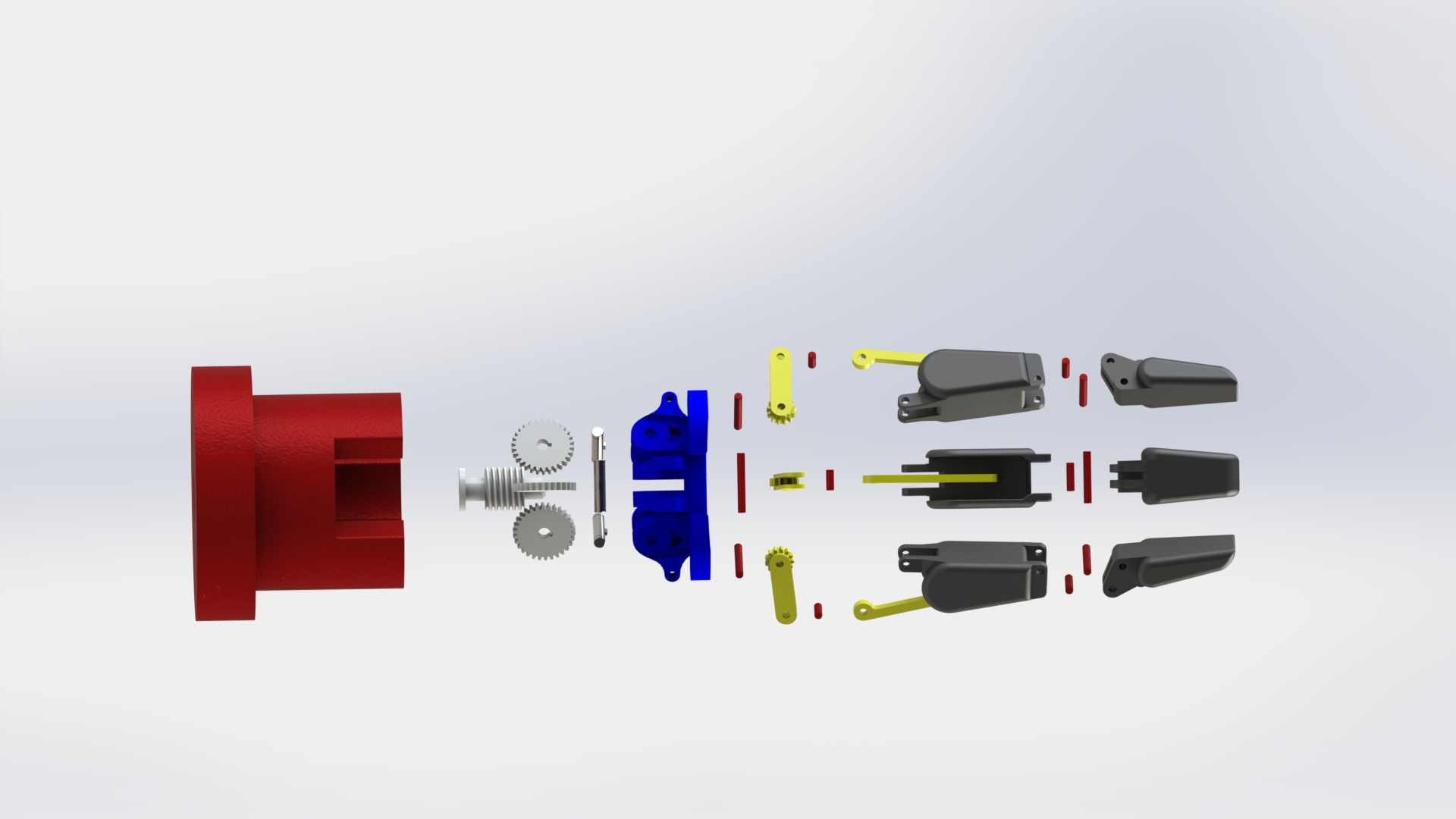
- Adaptive Gripper
I have an end-effector adapted from an open-source three-fingered adaptive grasping gripper from the authors Kuat Telegenov et al.
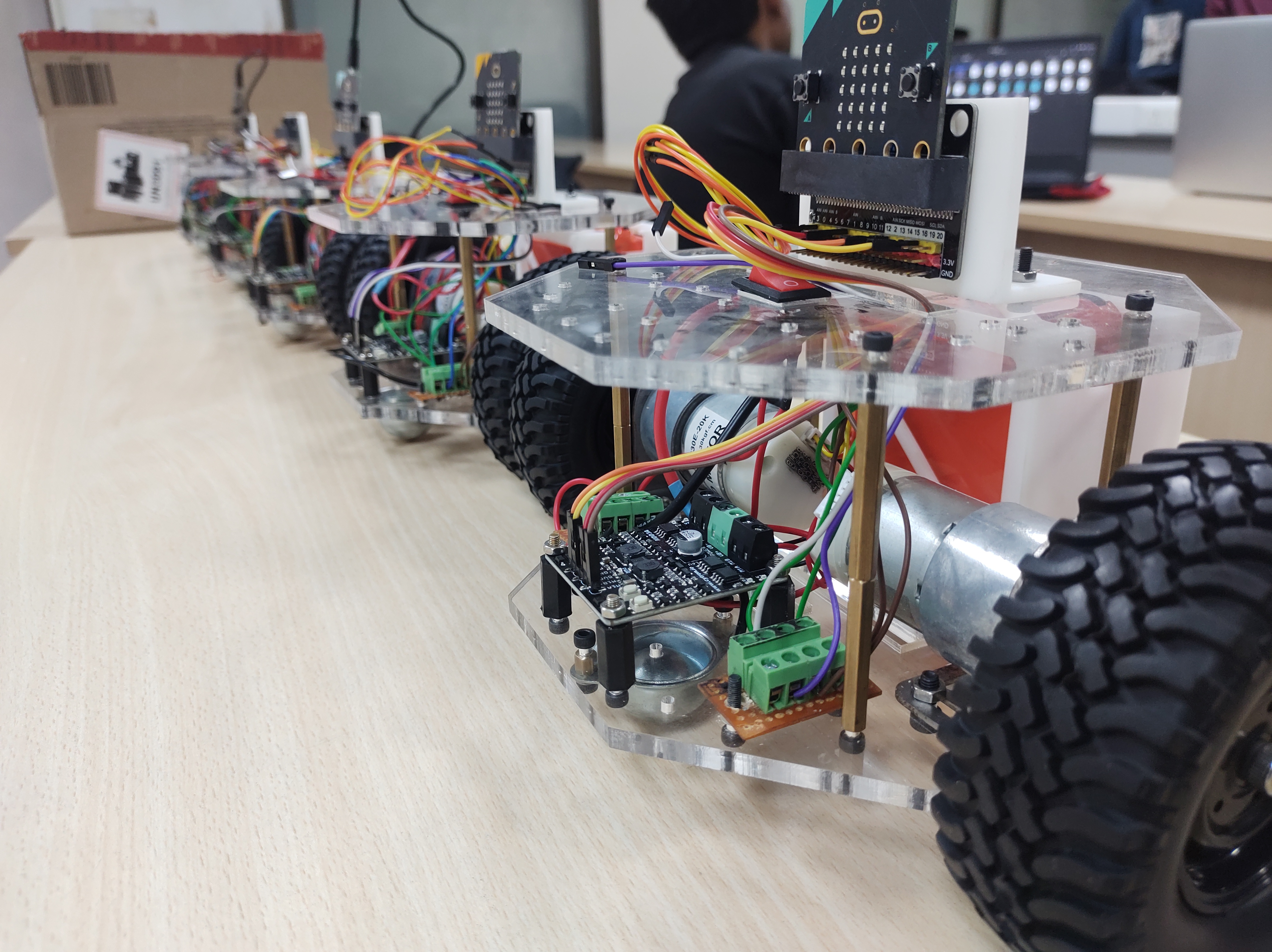
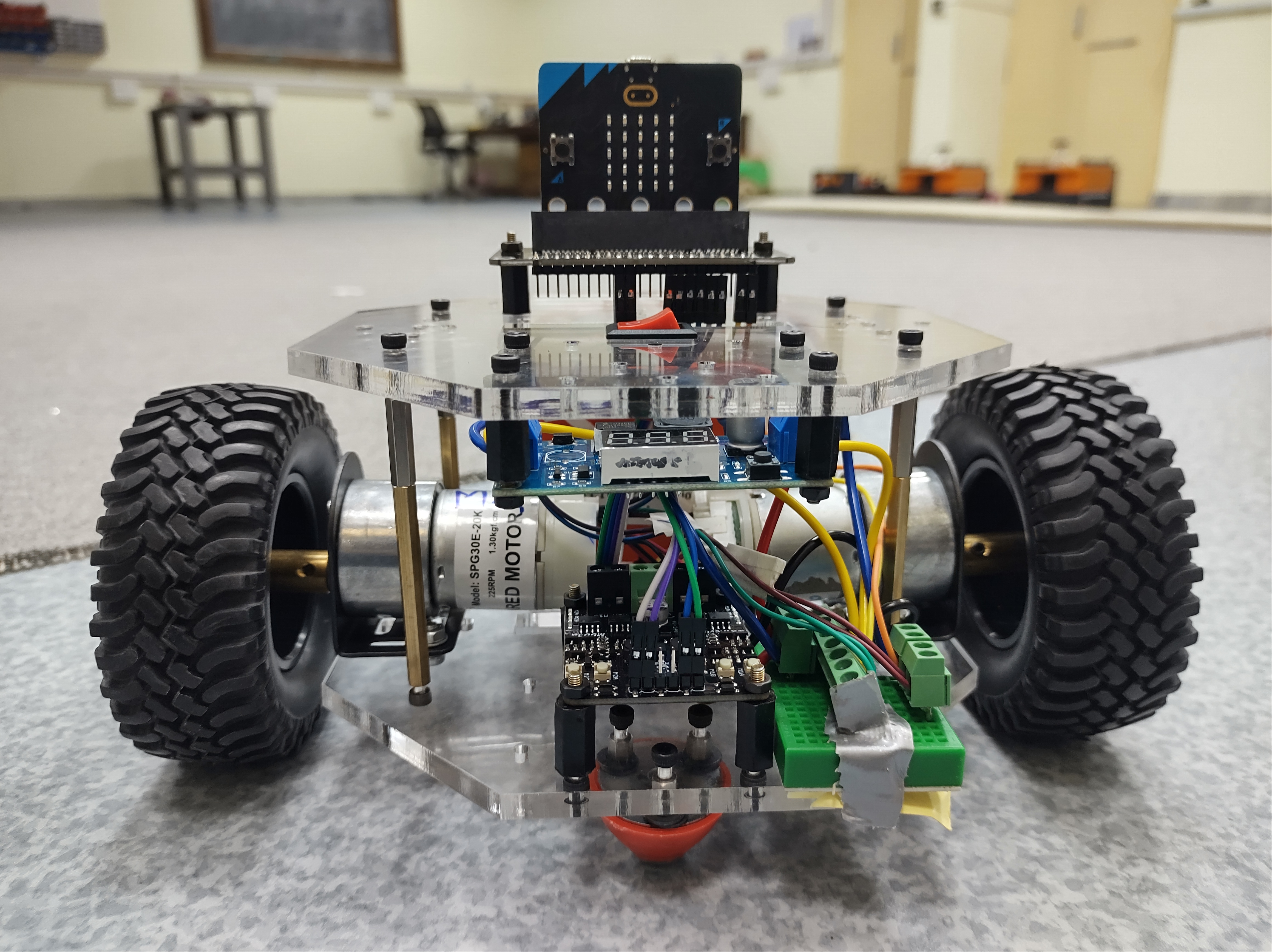
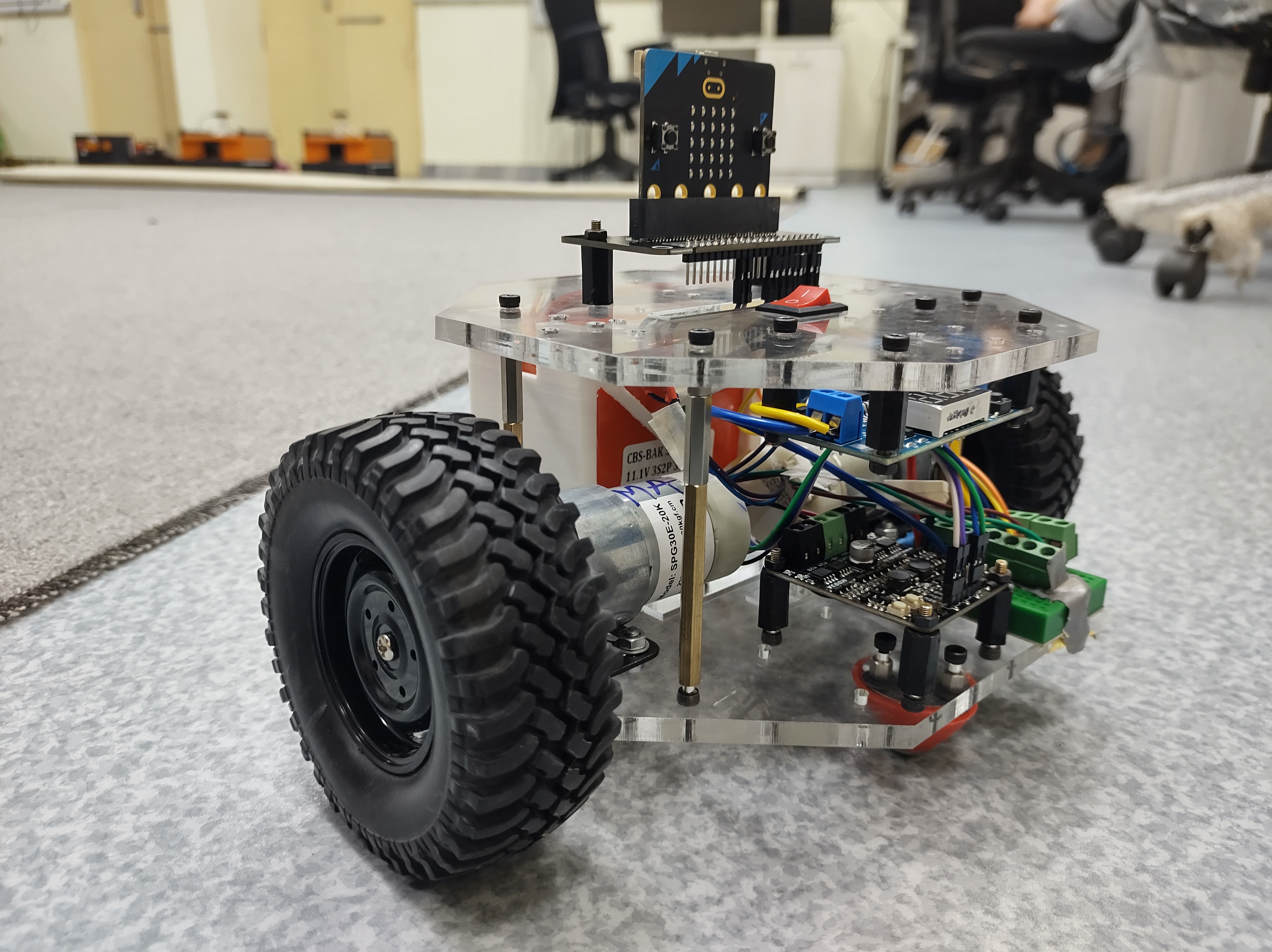
StackBot
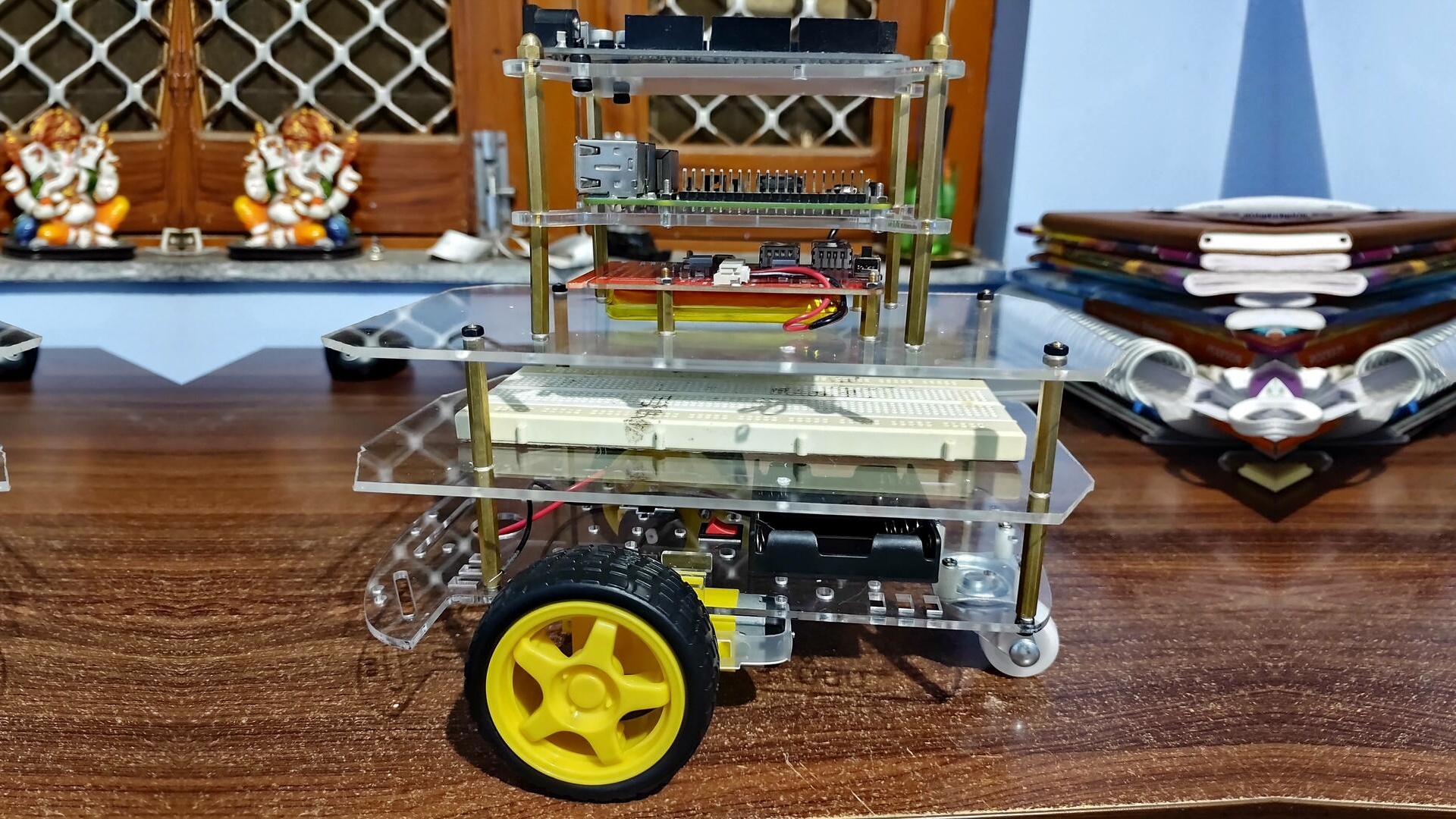
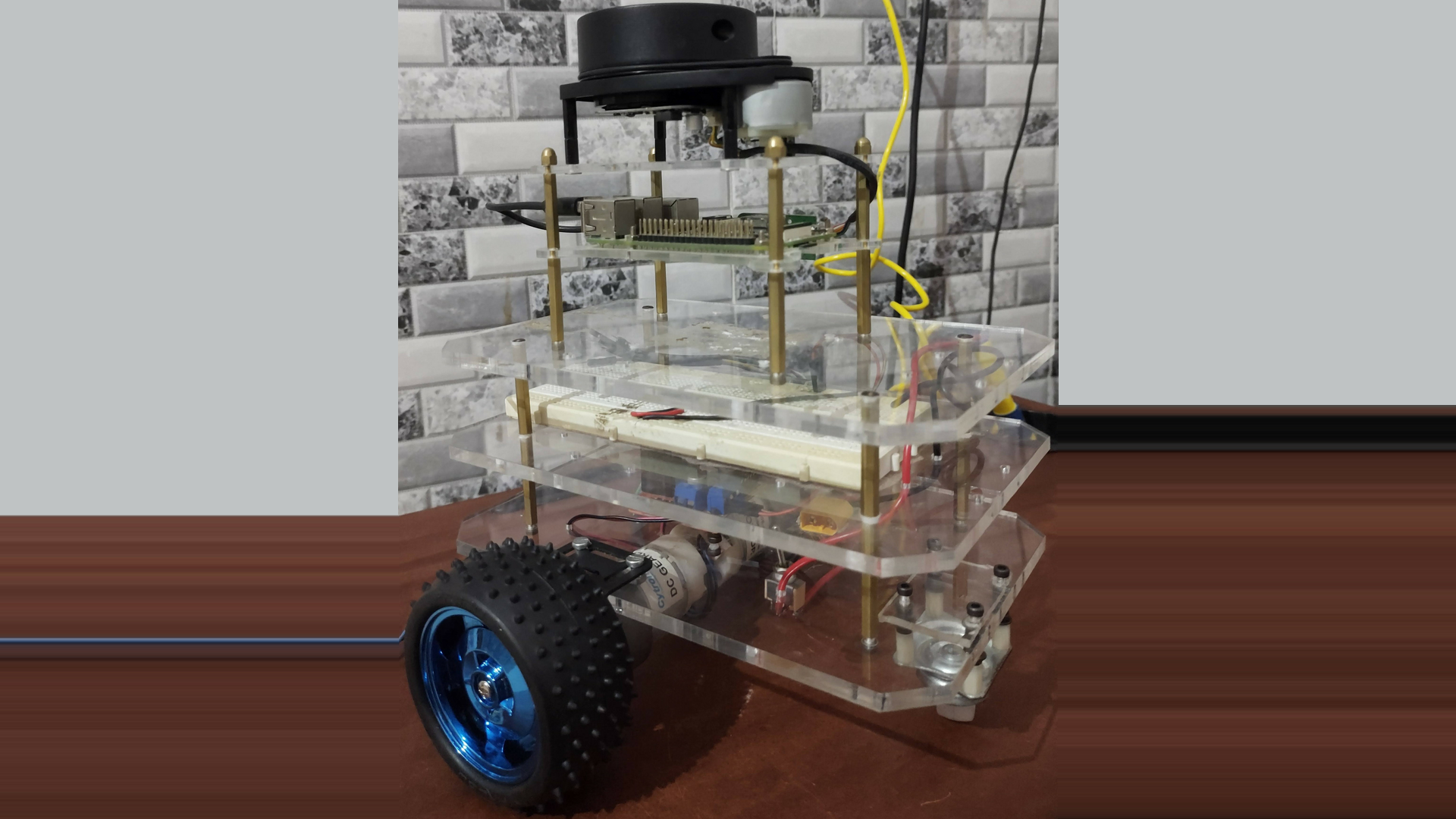
StackBot Mini
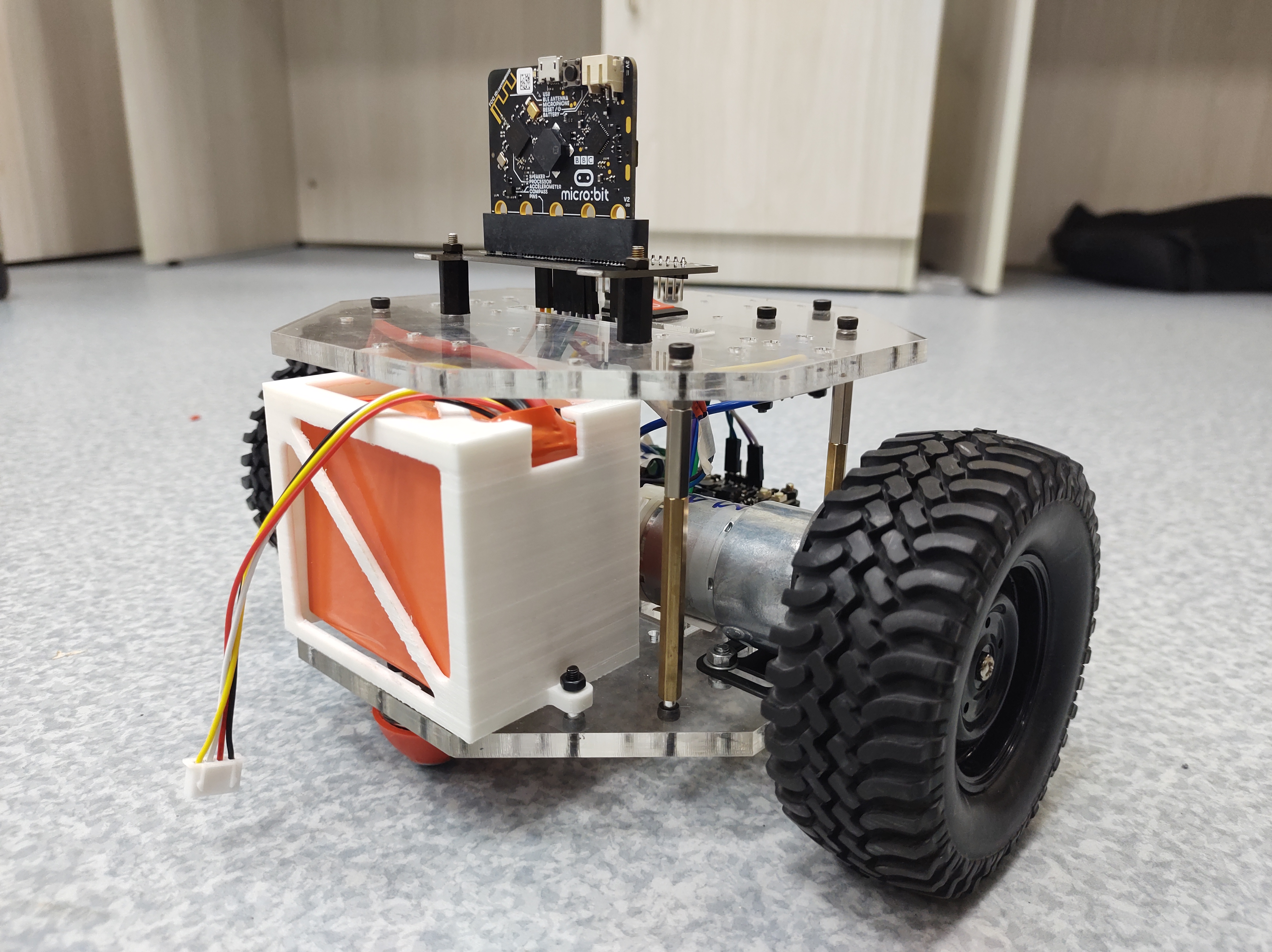
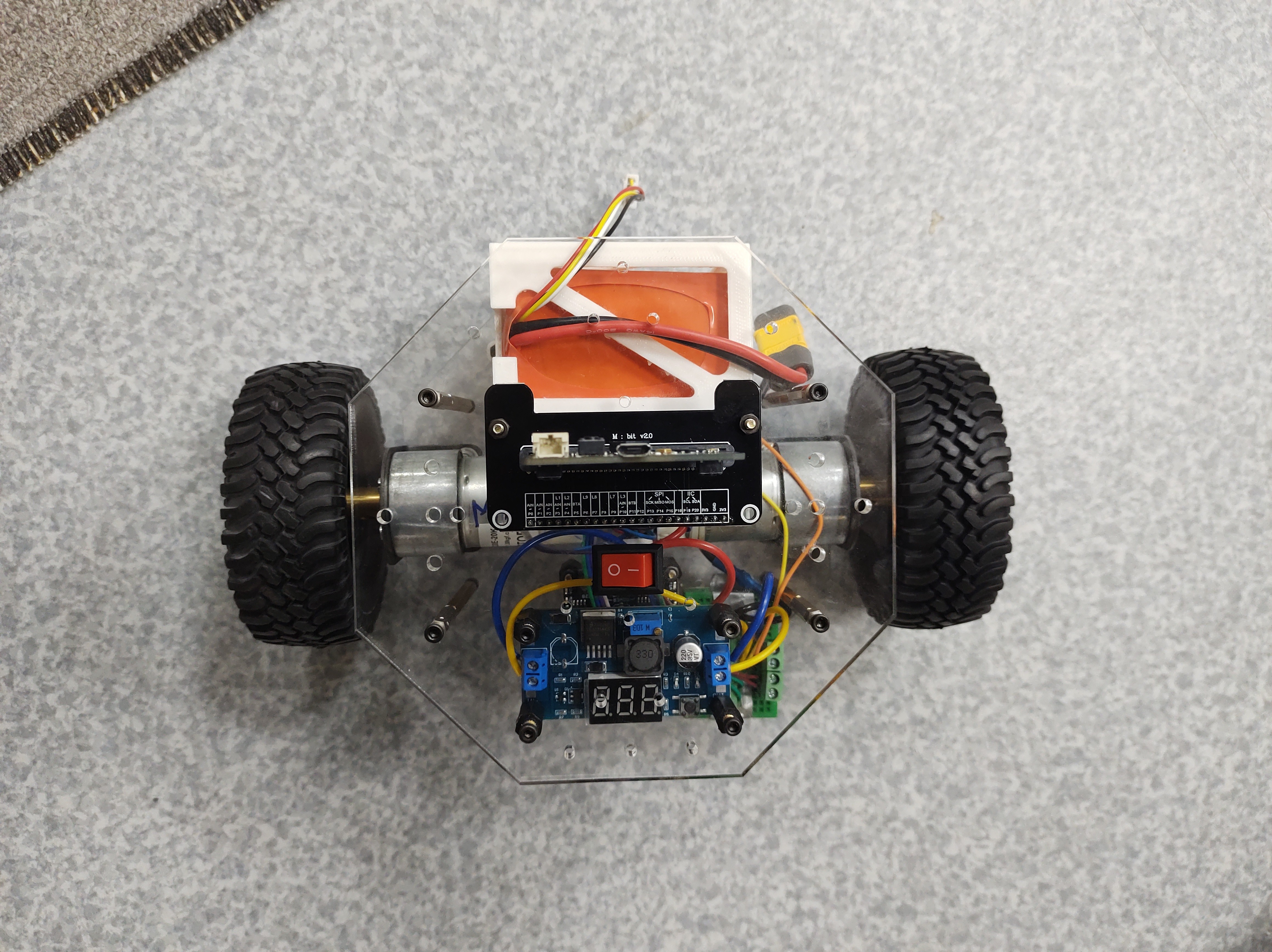
Hi, I am StackBot Mini, a smaller version of my brother StackBot. I was made as a teaching material for a course CP212, taught at Robert Bosch Center for Cyber Physical Systems, Indian Institute of Science.